Line-following, Orientation Sensing Romi Robot
Documentation
As part of our project, we created a website for documentation of every aspect of the project.
Here’s a quick overview
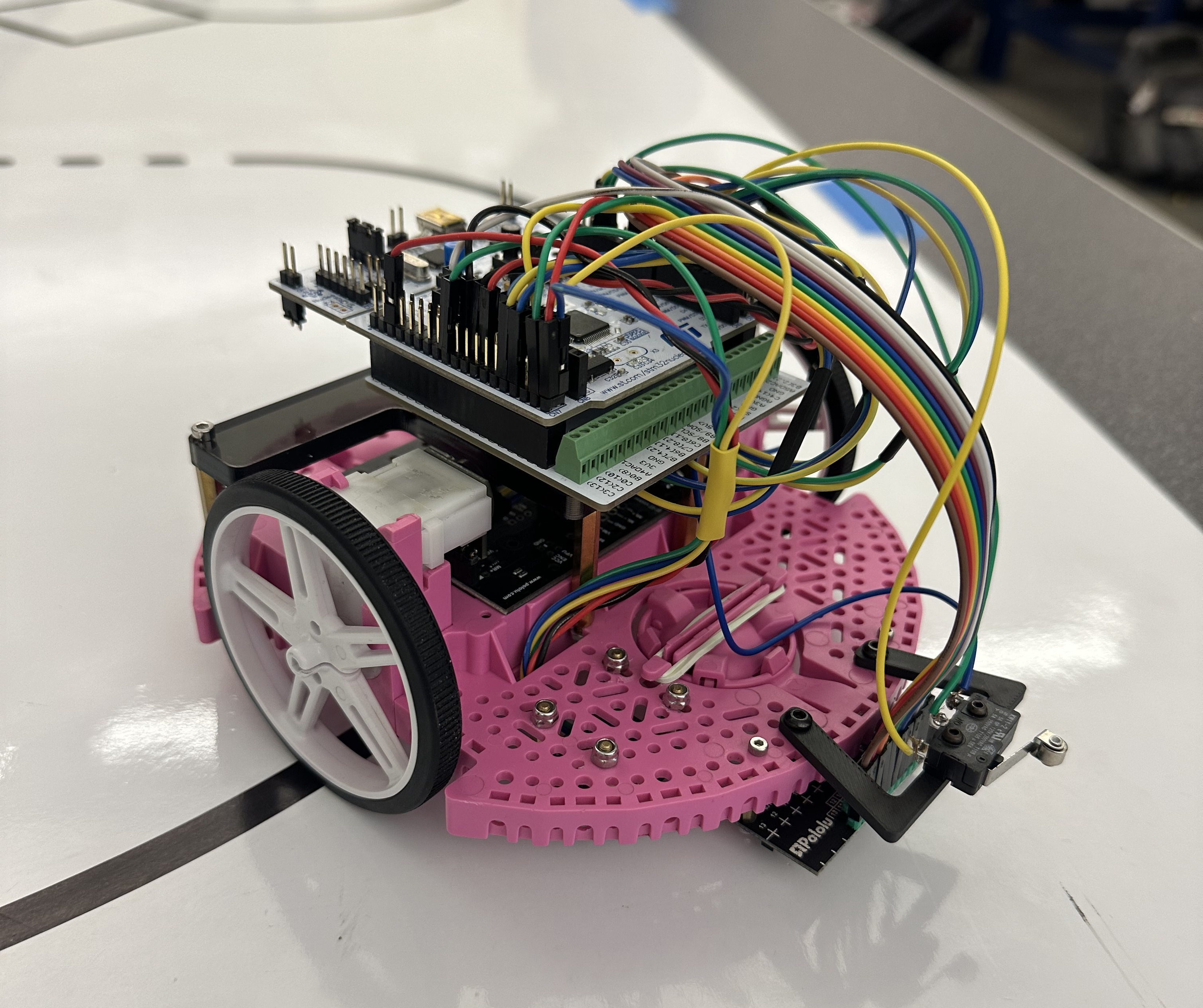
The Project - Romi
Throughout the quarter in ME-405, we worked on labs that built, wired, and programmed our mini-car robot, Romi, in different ways for different tasks.
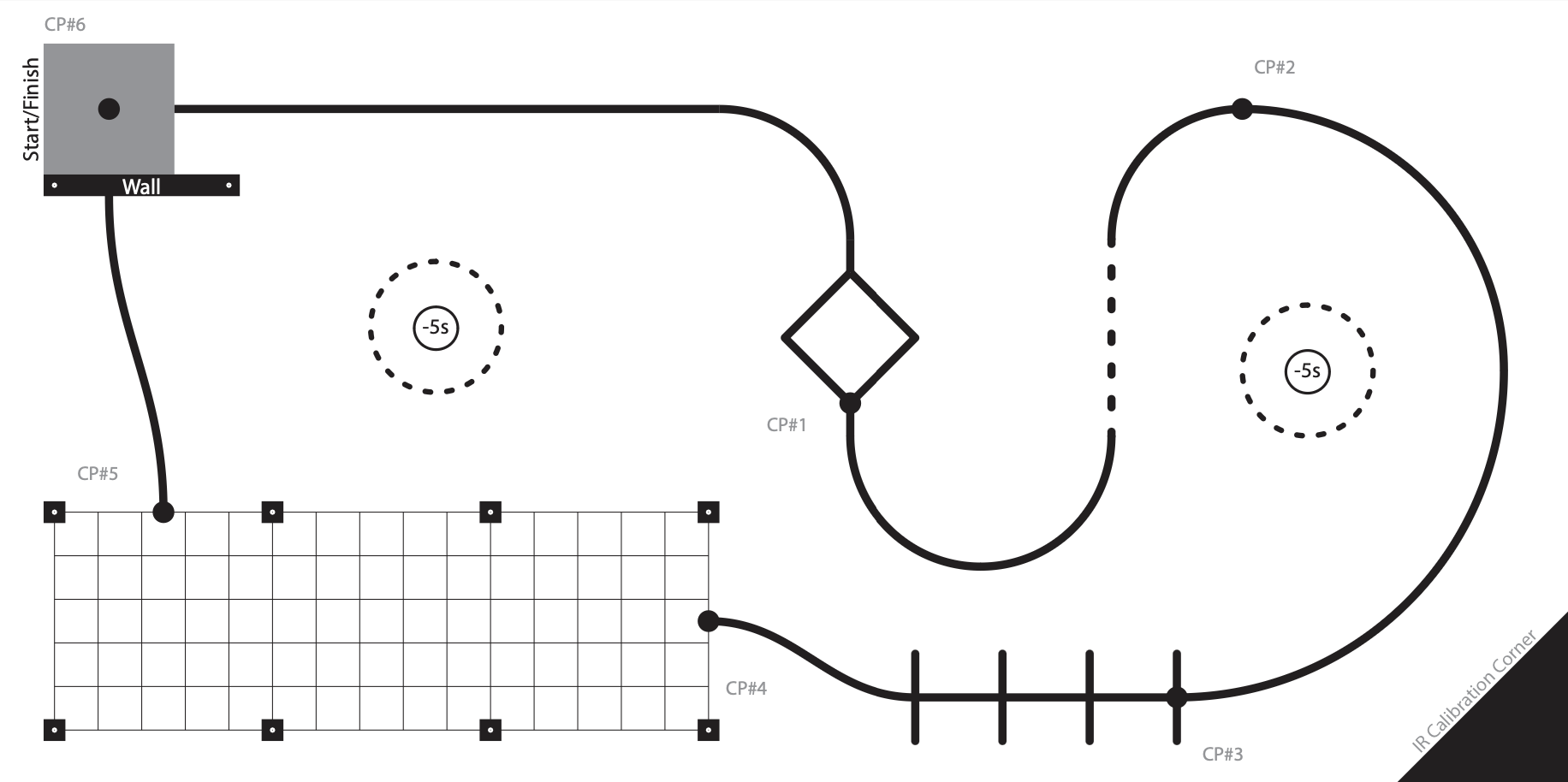
We parameterized our motors, implemented task-based non-blocking programming, implemented an IR line sensor, and worked with an IMU. All of these labs were building towards our term project/challenge. We needed to complete the following course by hitting each checkpoint, detecting the wall and making our way back to the start pad.
Course
Successful Run
(Yes, we barely made it back on the pad but we are counting it :))